
Merge branch 'doc/update-readme' into 'master'
[common] (doc) update with new tools and installs See merge request polystar/robomaster/computer-vision/code!56
No related branches found
No related tags found
Showing
- README.md 90 additions, 15 deletionsREADME.md
- common/README.md 0 additions, 17 deletionscommon/README.md
- common/tests/common/integration_tests/__init__.py 0 additions, 0 deletionscommon/tests/common/integration_tests/__init__.py
- common/tests/common/integration_tests/datasets/__init__.py 0 additions, 0 deletionscommon/tests/common/integration_tests/datasets/__init__.py
- common/tests/common/integration_tests/datasets/test_dji_dataset.py 22 additions, 0 deletions...sts/common/integration_tests/datasets/test_dji_dataset.py
- common/tests/common/integration_tests/datasets/test_dji_zoomed_dataset.py 22 additions, 0 deletions...mon/integration_tests/datasets/test_dji_zoomed_dataset.py
- common/tests/common/integration_tests/datasets/test_twitch_dataset_v1.py 20 additions, 0 deletions...mmon/integration_tests/datasets/test_twitch_dataset_v1.py
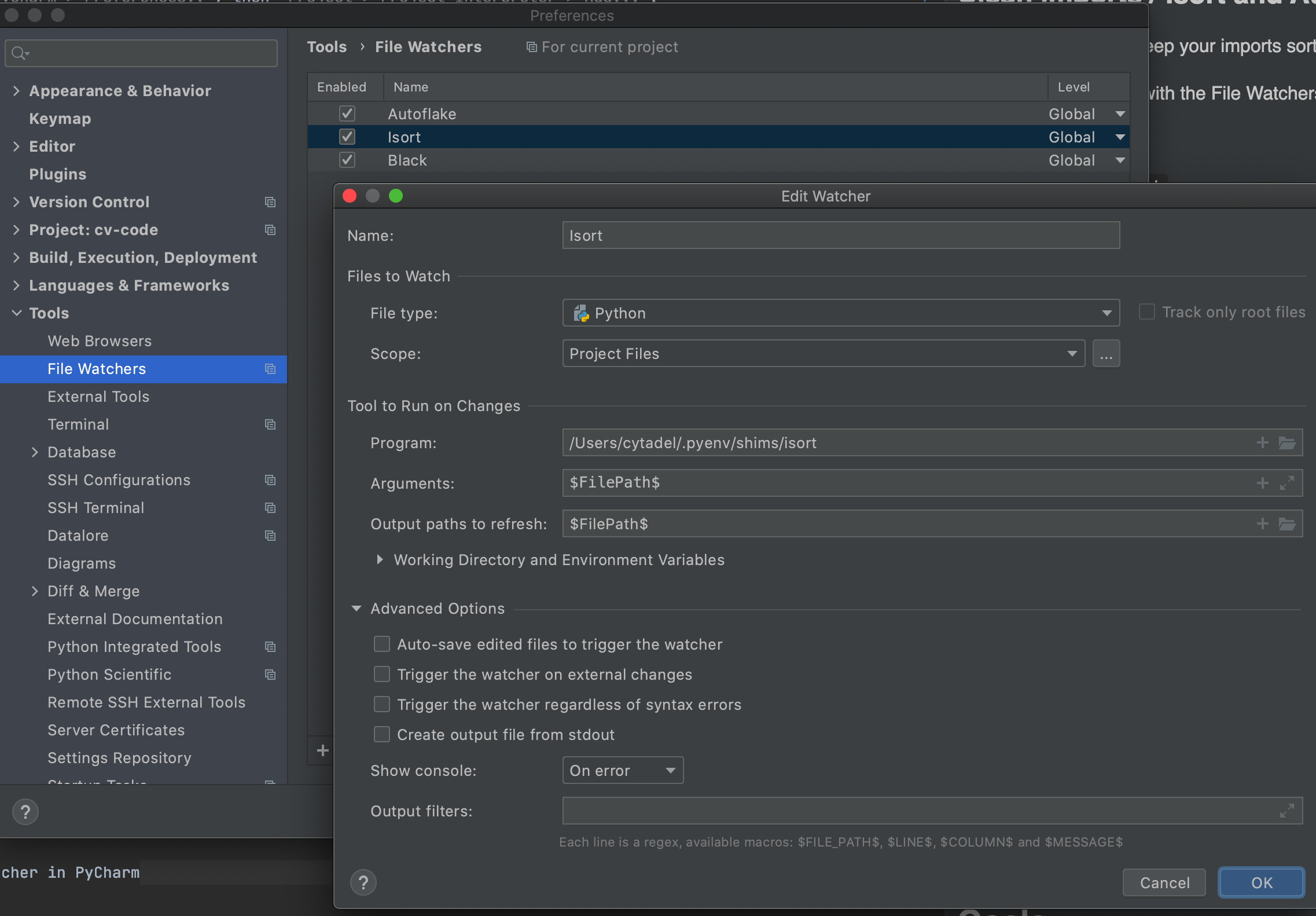
- doc/add_isort.png 0 additions, 0 deletionsdoc/add_isort.png
- doc/dataset_dji_repo.png 0 additions, 0 deletionsdoc/dataset_dji_repo.png
- doc/dataset_twitch_repo.png 0 additions, 0 deletionsdoc/dataset_twitch_repo.png
doc/add_isort.png
0 → 100644
{kind=link}
620 KiB
{kind=link}
File moved
{kind=link}
File moved